Distributed System 6-4
분산시스템 — Synchronization Part 4 (Vector Clock·인과적 통신·상호 배제 입문)
이 문서는 Tanenbaum의 Distributed Systems 6장 Synchronization을 기반으로 한 강의(슬라이드 45번부터 57번까지)를 정리한 것이다. 다루는 범위는 램포트 논리 시계가 인과성(causality)을 포착하지 못하는 한계, 그 보완책인 벡터 시계(vector clock)의 정의·구조·갱신 알고리즘, 벡터 시계로 인과적 통신(causal communication)을 강제하는 두 조건과 예제(Figure 6-13), 순서 보장을 미들웨어가 할지 애플리케이션이 할지에 대한 end-to-end 논의, 그리고 상호 배제(mutual exclusion)의 개요와 중앙식(centralized) 알고리즘까지이다. 이 문서는 6장 Synchronization의 네 번째 강의를 정리한 것이며, 세 번째 강의 정리본인
dsc_ch6_pt3.md를 잇고, 다섯 번째 강의 정리본인dsc_ch6_pt5.md로 이어진다.
0. 지난 시간 복습
지난 시간에는 램포트 논리 시계를 확장하여, 복제된 은행 계좌 갱신 같은 상황에서 모든 사이트가 이벤트를 동일한 순서로 처리하도록 만드는 totally ordered multicasting을 다루었다. 타임스탬프를 (논리 시계).(프로세스 ID)로 구성해 큐에 정렬하고, 세 조건에 따라 확인 메시지(acknowledgement)를 주고받아, 모든 프로세스의 확인을 받은 큐의 헤드 메시지만 실행하는 방식이었다. 이번 시간에는 논리 시계가 잡아내지 못하던 인과성을 포착하는 벡터 시계로 넘어가고, 이어서 6장의 둘째 큰 주제인 상호 배제로 들어간다.
1. 램포트 논리 시계의 한계 — 인과성(causality)
램포트 논리 시계는 한 프로세스 안에서 증가하는 단일 숫자이며, 다른 프로세스로부터 메시지를 받았을 때만 그 타임스탬프와 비교하여 보정되었다. 그래서 happens-before 관계가 분명한 이벤트(같은 프로세스 내 순서, 메시지 송신→수신)는 시계 값으로 순서를 알 수 있었지만, 그 외의 이벤트는 비교할 수 없었다.
핵심 한계는 다음과 같다. C(a) < C(b)라고 해서 a가 실제로 b보다 먼저 발생했다는 보장은 없다. 즉 램포트 논리 시계는 인과성(causality)을 포착하지 못한다. 인과성이란 원인과 결과의 관계로, 겉보기에는 무관한 두 이벤트라도 a가 일어남으로 인해 결과적으로 b가 발생하는 경우를 말한다.
예를 들어 Figure 6-12에서 P3이 m2를 보내는 이벤트와 P2가 m1을 받는 이벤트는 서로 다른 메시지에 관한 것이라 직접적인 happens-before 관계가 없다. 그림에서 P2가 m1을 받을 때 시계가 16이고 P3이 m2를 보낼 때 시계가 20이라고 해서, 16 < 20이니 m1 수신이 먼저라고 판단해서는 안 된다. 이 둘은 concurrent하며, 논리 시계만으로는 순서를 알 수 없다.
2. 벡터 시계(Vector Clock)의 정의와 구조 (★ 핵심)
정의
벡터 시계는 인과성을 포착할 수 있다. 이벤트 a에 부여된 벡터 시계 VC(a)가 어떤 이벤트 b에 대해 VC(a) < VC(b)이면, a가 b에 인과적으로 선행(causally precede)한다는 것을 보장한다. 단일 숫자 대신 여러 숫자의 배열(vector)을 쓴다.
여기서 벡터끼리의 부등호 VC(a) < VC(b)는 스칼라 대소가 아니라 성분별 비교로 정의한다. 즉 모든 칸 k에서 VC(a)[k] ≤ VC(b)[k]이고, 적어도 한 칸에서 VC(a)[k] < VC(b)[k]인 경우를 말한다. 반대로 두 벡터가 서로 어느 칸도 일방적으로 앞서지 못하면(한쪽이 큰 칸과 다른 쪽이 큰 칸이 동시에 존재하면), 두 이벤트는 concurrent하다.
구조
전체 프로세스가 n개라면 각 프로세스가 유지하는 벡터 시계는 n개의 값을 가지는 배열이다. 프로세스 Pi는 벡터 VCi를 유지하며, 다음 두 성질을 가진다.
- VCi[i]: Pi에서 지금까지 발생한 이벤트의 수. 즉 Pi의 로컬 논리 시계이다.
- VCi[j] = k (i ≠ j): Pi가 알기로 Pj에서 k개의 이벤트가 발생했다는 뜻. 즉 Pi가 알고 있는 Pj의 로컬 시각이다.
값이 “이벤트의 발생 횟수”라는 점이 단일 논리 시계와 같다(1씩 증가하므로). 차이는, 내 칸뿐 아니라 다른 프로세스 칸까지 가지고 있어 “내가 알기로 다른 프로세스가 몇 개의 이벤트를 했는가”라는 정보를 함께 안다는 것이다. 아는 정보가 많아지므로 할 수 있는 일도 많아진다. (실제 횟수보다 작을 수 있는데, 그 정보를 담은 메시지를 아직 못 받았다면 갱신되지 않은 채 남아 있기 때문이다.)
3. 벡터 시계 갱신 알고리즘 (★)
램포트 논리 시계의 갱신 규칙과 거의 같으며, 단일 값 대신 벡터의 각 칸에 적용한다는 점만 다르다.
- 로컬 이벤트 전: Pi가 이벤트를 실행하기 전에
VCi[i] ← VCi[i] + 1(내 칸만 증가). - 메시지 송신: Pi가 Pj에게 m을 보낼 때, 위 단계를 거친 뒤의 VCi 전체를 타임스탬프
ts(m)으로 실어 보낸다(벡터 전체가 간다). - 메시지 수신: Pj가 m을 받으면 모든 k에 대해
VCj[k] ← max{VCj[k], ts(m)[k]}로 각 칸을 갱신한 뒤, 1단계를 수행하고 애플리케이션에 전달한다.
값이 줄어드는 일은 없다(이미 발생한 이벤트는 취소할 수 없으므로). 받은 메시지의 타임스탬프가 더 크면 그 값으로 점프하고, 아니면 1씩 늘어난다.
타임스탬프의 의미는 다음과 같다. 이벤트 a의 타임스탬프 ts(a)에서 ts(a)[i] − 1은 Pi에서 a보다 앞서(causally precede) 발생한 이벤트의 수를 나타낸다. 즉 ts(m)은 수신자에게 “이 m을 보내기 전에 다른 프로세스들에서 몇 개의 이벤트가 선행했는지, m이 무엇에 인과적으로 의존하는지”를 알려 준다. 예컨대 아래 §5 예제에서 P1이 보내는 m*의 타임스탬프는 (1,1,0)인데, P0 칸이 1이라는 것은 “m* 이전에 P0에서 1개의 이벤트(메시지 m 송신)가 선행했다”는 뜻이다. 따라서 m*를 받는 쪽은 m을 먼저 받아 처리한 뒤에야 m*를 전달해야 함을 이 타임스탬프만 보고도 알 수 있다.
4. 인과적 통신(Causal Communication) 강제 (★)
무엇을 하려는가
벡터 시계로 인과적 통신을 강제할 수 있다. 어떤 메시지를 받았을 때, 그 메시지보다 인과적으로 앞선 메시지들을 아직 받지 못했다면 바로 애플리케이션에 전달하지 않고 기다린다. 멀티캐스트에서는 순서가 뒤바뀌어 나중 메시지가 먼저 도착할 수 있는데, 그럴 때 선행 메시지가 도착해 전달될 때까지 지연시킨다.
가정 (이 예제에 한정한 수정)
- 시계는 메시지를 보내고 받을 때만 조정한다(로컬 이벤트는 관여하지 않는다).
- 메시지를 보낼 때 Pi는
VCi[i]만 1 증가시킨다. - 메시지 m을 전달할 때 모든 k에 대해
VCi[k] ← max{VCi[k], ts(m)[k]}로만 조정하고, 그 뒤의 +1은 하지 않는다(일반 규칙과 다른 점).
전달 조건 (★ 두 조건)
Pj가 Pi로부터 타임스탬프 ts(m)을 가진 m을 받았을 때, 다음 두 조건이 모두 만족되어야 애플리케이션으로 전달한다(i는 송신자의 인덱스).
- ts(m)[i] = VCj[i] + 1 : m은 Pj가 Pi로부터 기대하던 바로 다음 메시지이다. (만약 차이가 1보다 크면, 그 사이에 Pi가 보낸 메시지를 못 받은 것이다.)
- ts(m)[k] ≤ VCj[k] for all k ≠ i : Pi가 m을 보낼 때 보았던 다른 프로세스들의 메시지를 Pj도 이미 다 보았다. (어떤 칸에서 ts가 더 크면, 다른 프로세스가 보낸 선행 메시지를 Pj가 아직 못 받은 것이다.)
1번은 “송신자 Pi가 m 이전에 보낸 메시지를 다 받았는가”, 2번은 “송신자 외의 다른 프로세스가 보낸 선행 메시지를 다 받았는가”를 확인한다. 둘 다 만족하면 m보다 앞선 모든 메시지를 받았다는 뜻이므로 전달해도 무방하다.
5. 인과적 통신 예제 (Figure 6-13)
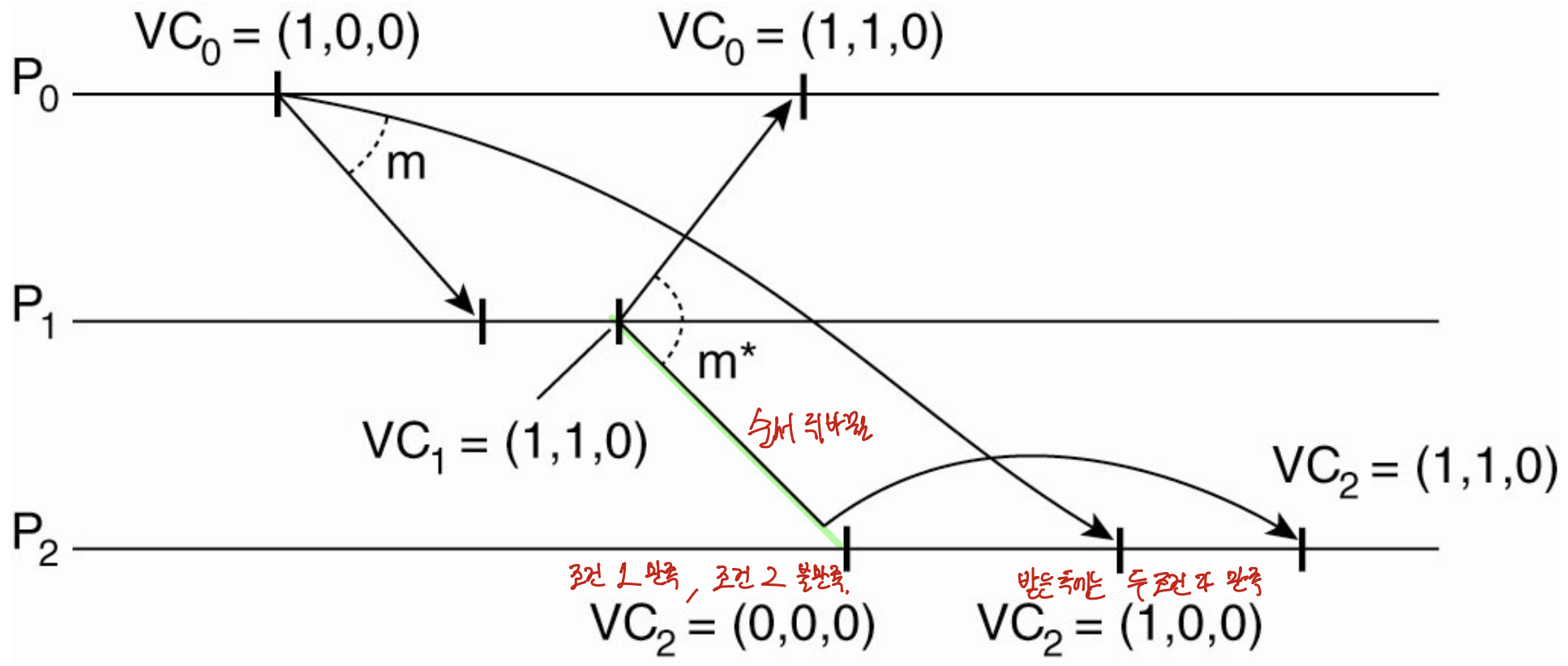
세 프로세스 P0, P1, P2가 있고 모두 벡터 시계를 (0,0,0)에서 시작한다. 메시지는 모두 멀티캐스트된다.
- P0가 m을 보냄: VC0 = (1,0,0). ts(m) = (1,0,0).
- P1이 m을 받음: P0(i=0)로부터. 조건1 ts[0]=1 = VC1[0]+1 = 1 ✓, 조건2 ts[1]=0≤0, ts[2]=0≤0 ✓. 전달. VC1 = (1,0,0). 그 결과로 P1이 m*를 보냄: VC1 = (1,1,0), ts(m*) = (1,1,0). 여기서 m → m*는 인과적으로 연결(causally related)되어 있다.
- P2가 m*를 먼저 받음(순서 뒤바뀜): VC2 = (0,0,0). P1(i=1)로부터. 조건1 ts[1]=1 = VC2[1]+1 = 1 ✓. 그러나 조건2에서 k=0: ts[0]=1 ≤ VC2[0]=0이 아니다(1 > 0). → 전달 지연(대기). (P0가 보낸 m을 아직 못 받았음을 안 것이다.)
- P2가 m을 받음: P0(i=0)로부터. 조건1 ts[0]=1 = VC2[0]+1 = 1 ✓, 조건2 ts[1]=0≤0, ts[2]=0≤0 ✓. 전달. VC2 = (1,0,0).
- P2가 대기하던 m*를 재검사: 조건1 ts[1]=1 = VC2[1]+1 = 1 ✓, 조건2 ts[0]=1 ≤ VC2[0]=1 ✓, ts[2]=0≤0 ✓. 전달. VC2 = (1,1,0).
- P0가 m*를 받음: 이미 m을 처리했으므로 두 조건이 만족되어 전달.
세 프로세스 모두 m → m* 순서로 처리하며, 끝에는 모두 벡터 시계가 (1,1,0)이 된다. P2에서 순서가 뒤바뀐 m*를 m이 도착할 때까지 미룬 것이 핵심이다.
6. 순서 보장의 주체 — 미들웨어 vs 애플리케이션 (end-to-end 논의)
미들웨어가 맡는 경우
ISIS, Horus 같은 전통적 미들웨어 시스템은 totally-ordered·causally-ordered multicasting을 서비스로 제공했다. 그러나 미들웨어는 메시지의 실제 내용을 들여다보지 못하므로 두 가지 문제가 있다.
- 과도하게 제한적(over-restrictive): 메시지 의미를 모르므로 잠재적 인과성(potential causality)만 포착한다. 같은 송신자가 보낸 완전히 독립적인 두 메시지조차 인과적으로 연관된 것으로 표시해 버린다.
- 놓치는 인과성: 외부 통신으로 생긴 인과성은 잡지 못한다. 예컨대 Alice가 글을 올리고 Bob에게 전화로 그 사실을 알려 Bob이 다른 글을 올리면, 두 글 사이에 인과성이 생기지만 미들웨어는 이 외부 경로를 모른다. (애매하면 미들웨어는 인과성이 있다고 치고 강하게 검사한다.)
애플리케이션이 맡는 경우 — end-to-end argument
순서 처리는 그 통신을 실제로 사용하는 애플리케이션이 직접 담당하는 것이 낫다는 주장이 end-to-end argument이다. 네트워크 계층에서 가장 끝단(end), 즉 최상위 애플리케이션 계층에서 처리하는 것이 맞다는 관점이다. 그러면 미들웨어가 놓치던 인과성도 효율적으로 처리할 수 있다.
- 단점: 애플리케이션이 vector clock·logical clock으로 totally ordered multicast나 causal communication을 직접 구현해야 한다. 이는 미들웨어가 통신 서비스를 제공해 개발 비용을 줄여 주려던 취지와 반대된다.
- trade-off: 순서가 애플리케이션에서 그리 중요한 기능이 아니라면(예: 전자 게시판), 구현이 까다로운 이 기능은 미들웨어가 API로 제공해 주는 편이 낫다.
7. 상호 배제(Mutual Exclusion) 개요
동기와 두 가지 접근
여러 프로세스(스레드)가 하나의 공유 자원을 동시에 접근하면 일관성이 깨지는 충돌(conflict)이 발생한다. 단일 시스템에서는 OS가 락(lock) 메커니즘으로 이를 해결한다. 자원을 쓰기 전에 락을 요청하면, OS가 하나의 락만 한 프로세스에게 주고 나머지는 대기 큐(waiting queue)에 넣는다. 본질은 직렬화(serialization), 즉 동시 요청을 줄 세워 한 번에 하나만 접근하게 하는 것이다. 분산 시스템에서도 같은 문제가 생기며, 해법은 크게 두 가지이다.
- 토큰 기반(token-based) 해법: 토큰(token)이라는 특별한 메시지를 프로세스들 사이로 계속 전달(passing)한다. 보통 논리적 링(ring) 형태로 구성되어 토큰이 순환하며, 토큰을 가진 프로세스만 자원을 접근할 수 있다. 다 쓰면 토큰을 넘긴다.
- (+) 프로세스 구성에 따라 모든 프로세스가 자원을 쓸 기회를 얻기 쉬워 기아(starvation)를 피한다. 교착(deadlock)도 쉽게 피한다.
- (−) 토큰이 분실되면(예: 토큰 보유 프로세스 충돌) 새 토큰을 만드는 복잡한 분산 절차가 필요하다.
- 허가 기반(permission-based) 해법: 자원을 쓰려면 먼저 다른 프로세스(들)의 허가를 받는다. 세부 방식으로 중앙식(centralized)·탈중앙식(decentralized)·분산식(distributed)이 있다.
두 방식 모두 공통 규칙은 “허가를 먼저 얻고, 접근하고, 다 쓰면 반드시 놓아 준다(release/pass)“이다. 계속 쥐고 있으면 다른 프로세스가 못 쓴다.
8. 중앙식 알고리즘 (Centralized Algorithm, Figure 6-14)
동작
조정자(coordinator) 프로세스 한 명을 둔다. 단일 시스템에서 OS가 하던 락 관리를 그대로 분산 환경으로 옮긴 것이다.
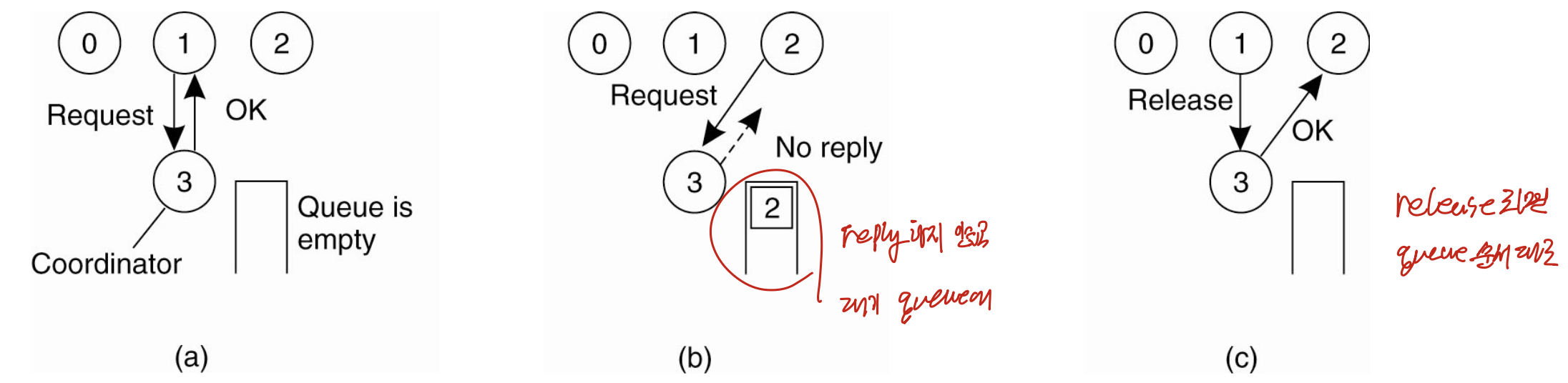
- (a) P1이 조정자에게 공유 자원 접근 허가를 요청하고, 허가(grant)를 받는다.
- (b) P1이 쓰는 중에 P2가 같은 자원을 요청하면, 조정자는 응답하지 않고(no reply) 요청을 대기 큐에 기록한다.
- (c) P1이 다 쓰고 release를 보내면, 조정자는 대기 큐를 보고 P2에게 OK를 보낸다. 이렇게 P1 → P2 순서가 지어진다.
동시에 요청이 와도 조정자에 먼저 도착한 요청에 OK를 보내고 나중 요청에는 답하지 않는다.
특징
- (+) 구현이 쉽다.
- (+) 자원 사용당 메시지가 3개(request, grant, release)면 된다. 분산 시스템에서 메시지 양은 적을수록 좋으므로 이 점이 유리하다.
- (−) 조정자가 단일 실패 지점(single point of failure)이다.
- (−) 요청 후 응답이 없을 때, 프로세스는 “허가 거부”인지 “조정자가 죽은 것”인지 구분할 수 없다. 둘 다 응답이 안 오기 때문이다. 그래서 거부를 의미하는 응답을 명시적으로 보내 주는 편이 더 확실하다.
단점이 작지는 않지만, 단순함에서 오는 이득이 단점을 능가하는 경우가 많다. 분산 해법이 반드시 더 나은 것은 아니다.
뒤이어 다룰 탈중앙식·분산식·토큰 링 알고리즘은 모두 이 중앙식의 단일 실패 지점을 보완하려고 나온 것이다. “한 명이 죽으면 안 되니 여러 명에게 물어보자”가 그 출발점이다.
다음 시간 예고
다음 차시에서는 중앙식의 단일 실패 지점을 보완한 탈중앙식(Lin의 투표 기반) 알고리즘과 분산식(Ricart-Agrawala) 알고리즘, 토큰 링 알고리즘을 차례로 보고 네 알고리즘을 메시지 수·지연 측면에서 비교한다. 이어서 6장의 마지막 주제인 선출(election) 알고리즘(Bully·Ring)으로 마무리한다.
한눈에 보는 전체 구조
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Vector Clock & 상호 배제 입문
├─ Lamport 한계: C(a)<C(b)라도 a→b 보장 못 함 (인과성 미포착, Fig 6-12)
│
├─ Vector Clock (★)
│ ├─ 구조: VCi[i]=내 이벤트 수, VCi[j]=내가 아는 Pj 이벤트 수
│ ├─ 성질: VC(a)<VC(b) ⇒ a가 b에 인과적 선행
│ └─ 갱신: ①내 칸+1 ②송신 ts(m)=VCi 전체 ③수신 각 칸 max 후 +1
│
├─ 인과적 통신 강제 (★, Fig 6-13)
│ ├─ 가정: 송수신 시에만 조정, 수신 시 max만(+1 없음)
│ ├─ 전달조건① ts(m)[i]=VCj[i]+1 (송신자의 다음 메시지)
│ ├─ 전달조건② ts(m)[k]≤VCj[k] (k≠i, 다른 선행메시지 다 받음)
│ └─ 예제: P2가 m* 먼저 받으면 m 올 때까지 대기 → 모두 (1,1,0)
│
├─ 순서 주체 논의: 미들웨어(ISIS/Horus) vs 애플리케이션(end-to-end)
│ └─ 미들웨어는 잠재 인과성만/외부 인과성 놓침 ↔ 앱은 직접 구현 부담
│
└─ 상호 배제
├─ 토큰 기반: 토큰 순환, (+)기아·교착 회피 (−)분실 시 복구 복잡
├─ 허가 기반: 중앙/탈중앙/분산
└─ 중앙식 (Fig 6-14): coordinator, request/grant/release(3개)
(+)단순 (−)단일 실패 지점, 무응답=거부/사망 구분 불가