CUDA.3 Writing CUDA SIMT Kernels
Basics of SIMT, Thread Hierarchy
모든 thread가 같은 kernel code를 실행하지만 고유한 thread ID가 있어서 서로 다른 데이터에 접근하여 작업을 수행
Grid > Block > Thread의 3단계 계층 구조를 갔는다.
- Thread: 고유한 register 존재
- Block: Shared Memory를 통해 block 내의 thread들 끼리 데이터를 공유하고 동가화 할수 있어
- Grid: Kernel이 실행될 때 생성되는 전체 스레드 블록들의 집합
GPU Device Memory Spaces
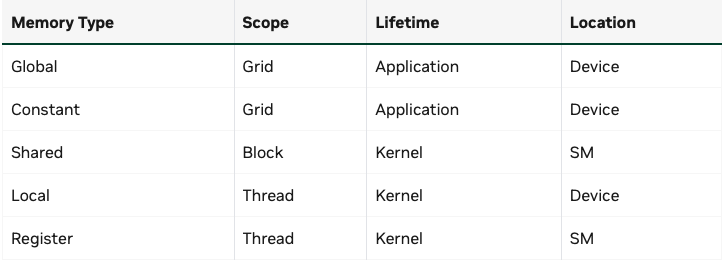
Global Memory
a.k.a. Device Memory Kernel내의 모든 thread가 접근 가능
- Persistence
- Kernel의 실행이 끝나도, 전역 메모리에 저장된 데이터를 사라지지 않아
- 명시적으로 해제 하거나(cudaFree), 프로그램이 종료될 때까지 살아있어
- 여러 커널이 sequential하게 실행 될때, 앞선 커널의 결과를 다음 커널이 이어 사용할수 있어.
- Memory Management
- Global Memory는 Host에서 CUDA API를 통해 직접 관리해야 해
- cudaMalloc, cudaMemcpy, cudaFree
- CUDA kernel의 return값은 항상 void -> GPU의 결과를 CPU에 전달할수 있는 유일한 방법은 Global Memory에 기록하기
- 모든 thread에게 공용이라서 race condition이 생길수 있어
Shared Memory
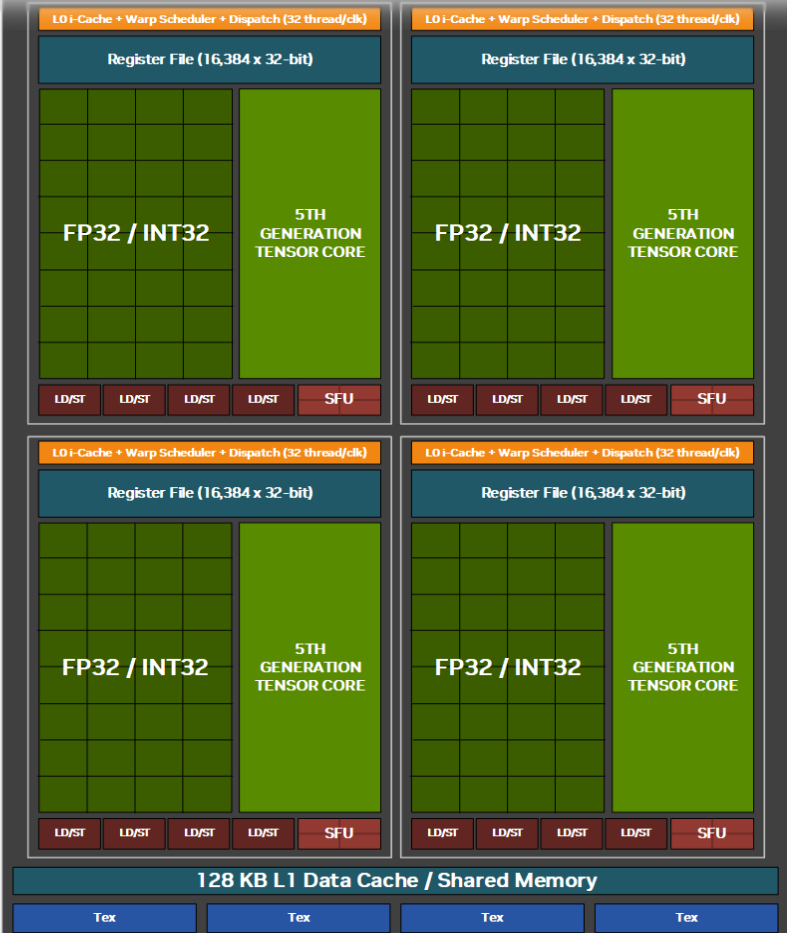
SM 내부에 물리적으로 존재하여 Thread Block내에 있는 쓰레드가 공유
- Global Memory보다 Bandwidth 높고, Latency 훨씬 낮아
- Kernel 실행 중 Block이 활성화된 동안에만 데이터 유지
마찬가지로 data race 발생할 수 있어 -> __syncthreads() 사용하자
- Block 내에서 Barrier의 역할을 해
Static allocation of Shared Memory (정적 할당)
Compile 시점에 Shared Memory의 크기가 정해져 있을때 사용
__shared__ 키워드 사용해서 배열의 크기를 상수로 명시해
1
2
3
4
5
6
// 예시: 1024개의 float를 저장하는 공유 메모리 정적 할당
__global__ void staticKernel() {
__shared__ float sharedArray[1024];
// ... 데이터 로드 및 __syncthreads() ...
}
Dynamic Allocation of Shared Memory (동적 할당)
커널 실행 시 3번째 인자로 필요한 바이트(Byte) 크기를 전달
1
2
// 그리드, 블록, [공유메모리 크기(Byte)]
kernelName<<<grid, block, sharedMemBytes>>>(args...);
커널 내부에서 extern shared 키워드로 크기가 없는 배열을 선언
1
extern __shared__ float sharedArray[]; // 크기 지정 안 함
extern __shared__ 변수는 커널 내에서 딱 하나만 선언 가능 -> 여러개 하고 싶으면 포인터로 manually partition 해야해
1
2
3
4
5
6
7
8
9
10
11
12
extern __shared__ float array[]; // 동적 할당된 전체 메모리 덩어리
// 1. 첫 번째 배열 (short 타입)
short* array0 = (short*)array;
// 2. 두 번째 배열 (float 타입)
// array0가 128개(short)만큼 쓴 그 다음 주소부터 시작
float* array1 = (float*)&array0[128];
// 3. 세 번째 배열 (int 타입)
// array1이 64개(float)만큼 쓴 그 다음 주소부터 시작
int* array2 = (int*)&array1[64];
Memory Alignment 주의하기: short(2byte) 127개 잡은거 뒤에 4byte 잡으면 4byte 정렬이 꺠져서 문제 생겨
Register
SM내부에 물리적으로 존재라고 Thread마다 고유하게 할당 돼
- Compiler가 자동으로 변수들을 레지스터에 배정
- Register를 많이 쓸수록 한 SM에서 동시에 실행할 수 있는 thread block occupancy가 줄어들어
- Register가 부족하면 Register Spilling 발생 -> 넘치는 데이터를 느린 local memory로 쫓아내.
Local Memory
Device Memory(우리가 흔히말하는 HBM 그거)에 존재하나, 각 thread 자신만 볼 수 있는 사적인 공간이야.
- L2, L1 cache를 탈수 있어
Constant Memory
read only, grid scope의 모든 thread가 접근 가능
- Device Memory에 존재하지만, 전용 constance cache를 갖는다.
- 여러 thread가 동시에 같은 주소의 상수 memory를 읽을 때, cache가 data를 broadcast해서 매우 빨라: broadcast에 특화되어 있는 cache
Caches
- L1: 각 SM 내부에 존재
- L2: GPU 전체가 공유, 모든 SM에서 접근. 전역 메모리와 SM 사이의 buffer 역할을 해

Texture and Surface Memory
과거 데이터 접근 패턴이 불규칙하거나 2D 공간적인 특성을 가질때, 이 메모리 공간을 사용해서 서능을 높였으나, 요즘에는 3D rendering과 데이터르 교환해야 하는 grapics Interop이 아닌 경우 거의 사용되지 않음
Distributed Shared Memory
여러 Block의 Shared Memory를 합쳐서 더 큰 고속 memory pool 처럼 사용하기
Thread Block Clusters 개념을 기반으로 한다.
- 클러스터 내의 모든 공유 메모리는 하나의 통합된 주소 공간으로 취급된다. -> 옆 block의 memory를 손쉽게 access
cluster.sync()를 사용하여 클러스터 내의 모든 블록의 실행 시점을 맞출수 있어- 단순 read 뿐만 아니라, write, atomic add등 여러개 가능
- Block 간 데이터 동신에 전역 메모리(DRAM)을 거치지 않아도 돼
- Distributed Shared Memory라도 Shared memory size specifications, static or dynamic is still per thread block.
Memory Performance
Local Memory(DRAM)는 thread 별로 (row-major)로 저장되지 않아
- Local memory를 thread ID 순서대로 interleaved하게 저장된다. => thread별로 연속적인 데이터를 access하기 떄문에 accesses become fully coalesced
- Warp내의 모든 thread가 각자의 배열에서 같은 index를 접근하기만 하면 이러한 memory 저장 방식은 매우 효율적
Coalesced Global Memory Access
CUDA의 Global Memory는, 메모리 요청을 효율적으로 처리하기 위해, Transaction 단위로 데이터 가져와
- Transaction 단위: 32byte 덩어리로 데이터를 읽거나 써
- Warp: 워프 내의 thread들이 memory 요청을 보내면, memory controller는 이를 최소한의 transaction으로 묶어서 처리하려 시도
- 따라서 warp 내의 연속된 thread들이 연속된 메모리 주소에 접근할때 완전 효율적
- warp 내 연속된 thread들이 멀리 떨어진 주소에 접근할 때 최악의 효율을 보인다.
Shared Memory Bank Conflict
Shared Memory는 하드웨어적으로 32개의 bank로 나뉘어 있다.
- 32 비트의 데이터가 차례대로 bank 0, 1, …, 31에 할당된다.
- 각 뱅크는 한 clock cycle에 하나의 32bit data를 처리할수 있다.
Bank Conflict
thread들이 서로 다른 주소에 접근하는데, 하필 그 주소들이 같은 bank에 있을때 발생 -> bank를 access하기 위해 Serialization이 돼
다음과 같은 경우는 Conflict 아님
- Broadcast: 여러 thread가 완벽히 동일한 주소를 읽을때
- Stride 1 접근: thread들이 연속된 데이터를 읽을때, (스레드 0→뱅크 0, 스레드 1→뱅크 1… → 충돌 없음)
Shared Memory Access Patterns
Atomics
Grid 전체 레벨에서의 데이터 보호 및 동기화
- Global Memory의 특정 주소에 대해 read-modify-write 작업을 원자적으로 수행
- 한 thread가 atomic 작업을 수행하는 동안, lock을 걸어버려
Cooperative Groups
Block보다 작은 단위, 블록보다 큰 단위를 묶어서 제어하게 해줘
- 소프트웨어적으로 원하는 thread들을 group으로 묶어 동기화 해주는 기능
- GPU 전체, multi GPU간의 동기화도 가능하게 해줘
Kernel Launch and Occupancy
Scheduling 원리
- Kernel이 실행되면 스케줄러는 thread block들을 GPU의 SM에 할당
- Block이 어떤 SM에, 어떤 순서로 배정될지 알수 없어, SM에 resource가 가용가능 할때만 block을 받아드려. 없으면 대기
- SM당 물리적 한계 존재
- maxBlocksPerMultiProcessor
- maxThreadsPerMultiProcessor
- sharedMemPerMultiprocessor
- regsPerMultiprocessor
Occupancy 계산 및 예시
Occupancy: SM이 처리할수 있는 이론상 최대 warp 수 대피, 실제로 활성화된 워프의 비율
- Occupancy가 높을수록 Memory Latency를 숨길수 있어 성능에 유리
SM당 최대 스레드 2048개, 최대 블록 32개 가정
상황 1: 스레드 제한에 걸린 경우
- 설정: 블록당 768 스레드 («<512, 768»>)
- 계산:
- SM 하나에 블록 1개 할당 → 768 스레드 (여유 있음)
- SM 하나에 블록 2개 할당 → 1536 스레드 (여유 있음)
- SM 하나에 블록 3개 할당? → 768 * 3 = 2304 스레드 (2048 초과! 불가능)
- 결과: SM당 블록 2개만 실행 가능.
- 점유율: (768 * 2) / 2048 = 75%
상황 2: 블록 수 제한에 걸린 경우
- 설정: 블록당 32 스레드 («<512, 32»>)
- 계산:
- 스레드 수로는 2048 / 32 = 64개의 블록도 들어갈 것 같음.
- 하지만 maxBlocksPerMultiProcessor가 32개로 제한됨.
- 결과: SM당 블록 32개만 실행 가능.
- 실제 스레드 수: 32개 블록 * 32 스레드 = 1024 스레드.
- 점유율: 1024 / 2048 = 50% (블록을 너무 잘게 쪼개서 손해를 본 경우)
상황 3: 공유 메모리 제한에 걸린 경우
- 설정: 커널이 블록당 100KB 공유 메모리 사용. (SM 한도는 약 233KB)
- 계산:
- 블록 1개: 100KB
- 블록 2개: 200KB
- 블록 3개: 300KB (233KB 초과! 불가능)
- 결과: 스레드 수나 레지스터가 널널해도, 공유 메모리가 커서 SM당 블록 2개밖에 못 돌림. 점유율 하락.
최적화 하기
- Block 당 thread수와 memory 사용량을 조절하여 occupancy를 최적화해야 해.
- Register을 제한하는 방법을 쓸수도 있어
--maxrregcount- register가 모자라서 local memory를 쓰게 되는 spilling이 생길수도 있지만, 더 많은 block을 SM에 넣을수 있어 성능이 오를수도 있어
https://docs.nvidia.com/cuda/cuda-programming-guide/02-basics/writing-cuda-kernels.html